
En el tema anterior" Classificació de motors elèctrics" ;, vaig explicar els diferents tipus de motor de corrent continu raspallat (BDC) que, com en el següent esquema:

Avui explicaré el motor de corrent continu sense escombretes (BLDC) i els motors d’inducció de corrent altern.
Podeu revisar els temes relacionats següents per revisar-los i un bon seguiment.
Components bàsics de motors elèctrics
2- Motors de corrent continu sense escombretes
|
Motors de corrent continu sense escombretes |

En els motors de corrent continu de raspalls, el commutador mecànic i els raspalls associats són problemàtics per diverses raons de la següent manera:
Es produeix un desgast dels raspalls i augmenta dràsticament en un entorn de baixa pressió.
Les espurnes dels raspalls poden provocar explosions si el medi ambient conté materials explosius.
El soroll de RF dels raspalls pot interferir amb aparells de televisió o dispositius electrònics propers, etc.
Els motors de corrent continu sense escombretes (BLDC) són un dels tipus de motors que guanyen popularitat ràpidament. Els motors BLDC s’utilitzen en indústries com ara electrodomèstics, automoció, aeroespacial, de consum, mèdica, equips d’automatització industrial i instrumentació.
Com el seu nom indica, els motors BLDC no utilitzen raspalls per commutar; en canvi, es commuten electrònicament.
Els motors BLDC tenen molts avantatges respecte als motors de corrent continu i els motors d’inducció, alguns d’aquests són:
Millors característiques de velocitat i parell.
Alta resposta dinàmica.
Alta eficiència.
Llarga vida útil.
Operació silenciosa.
Rangs de velocitat més alts.
A més, la relació de parell lliurat a la mida del motor és més elevada, cosa que el fa útil en aplicacions on l’espai i el pes són factors crítics.
Construcció
Els motors BLDC són un tipus de motor síncron. Això significa que el camp magnètic generat per l’estator i el camp magnètic generat pel rotor gira a la mateixa freqüència.
Els motors BLDC es presenten en configuracions monofàsiques, bifàsiques i trifàsiques. Corresponent al seu tipus, l'estator té el mateix nombre de bobinats. D’aquests, els motors trifàsics són els més populars i els més utilitzats.
1- Estator
|
L’estator d’un motor BLDC |

L’estator d’un motor BLDC consisteix en laminacions d’acer apilades amb bobinatges col·locats a les ranures que es tallen axialment al llarg de la perifèria interior.
La majoria dels motors BLDC tenen tres bobinatges d’estator connectats de manera estrella. Cadascun d’aquests bobinatges està construït amb nombroses bobines interconnectades per formar un bobinatge. Una o més bobines es col·loquen a les ranures i estan interconnectades per fer un bobinatge. Cadascun d’aquests bobinatges es distribueix per la perifèria de l’estator per formar un nombre parell de pols.
Depenent de la capacitat d’alimentació del control, es pot triar el motor amb la tensió nominal correcta de l’estator. Els motors de quaranta-vuit volts o menys de tensió s’utilitzen en automoció, robòtica, moviments de braços petits, etc. Els motors de 100 volts o potències superiors s’utilitzen en electrodomèstics, automatismes i aplicacions industrials.
2- Rotor
|
El rotor d’un motor BLDC |

El rotor està format per un imant permanent i pot variar de dos a vuit parells de pols amb pols alterns Nord (N) i Sud (S).
|
Posicions dels imants del rotor BLDC |
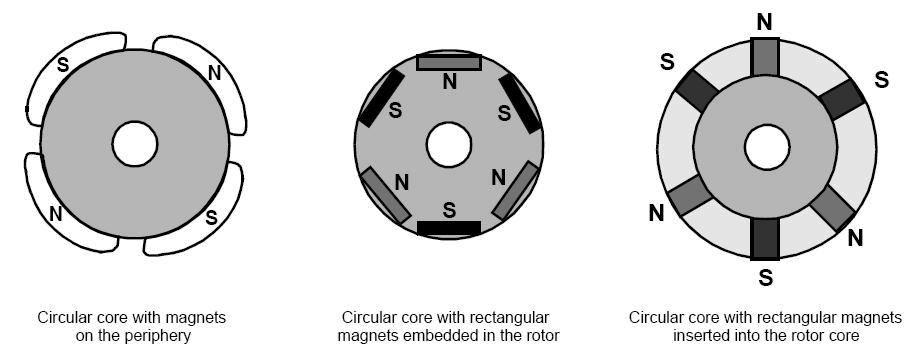
En funció de la densitat de camp magnètic requerida al rotor, es tria el material magnètic adequat per fabricar el rotor. Els imants de ferrita s’utilitzen tradicionalment per fabricar imants permanents.
3- Sensors Hall
|
Sensors de sala BLDC |
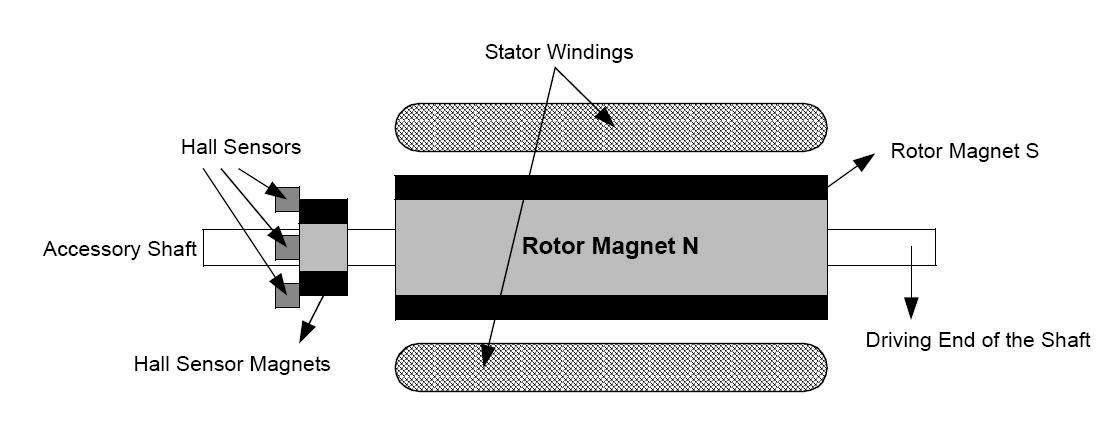
A diferència d’un motor de corrent continu, la commutació d’un motor BLDC es controla electrònicament. Per girar el motor BLDC, els bobinatges de l’estator s’han d’energia en una seqüència. És important conèixer la posició del rotor per entendre quin bobinat s’energitzarà seguint la seqüència d’energia. La posició del rotor es percep mitjançant sensors Hall Effect incrustats a l’estator.
La majoria dels motors BLDC tenen tres sensors Hall incrustats a l’estator a l’extrem que no condueix el motor.
Sempre que els pols magnètics del rotor passen a prop dels sensors Hall, donen un senyal alt o baix, indicant que el pol N o S passa a prop dels sensors. Basant-se en la combinació d’aquests tres senyals del sensor Hall, es pot determinar la seqüència exacta de commutació.
En funció de la posició física dels sensors Hall, hi ha dues versions de sortida. Els sensors Hall poden tenir un desplaçament de fase de 60 o 120 ° entre si. En funció d’això, el fabricant del motor defineix la seqüència de commutació, que s’ha de seguir quan es controla el motor.
Nota: Els sensors Hall requereixen una font d'alimentació. La tensió pot oscil·lar entre 4 i 24 volts. El corrent requerit pot variar de 5 a 15 paperetes.
Teoria del funcionament
Cada seqüència de commutació té un dels bobinatges energitzats a potència positiva (el corrent entra al bobinatge), el segon bobinat és negatiu (el corrent surt del bobinatge) i el tercer es troba en estat no energitzat.
El parell es produeix a causa de la interacció entre el camp magnètic generat per les bobines de l’estator i els imants permanents del rotor.
Per mantenir el motor en funcionament, el camp magnètic produït pels bobinats hauria de canviar de posició, a mesura que el rotor es mogui per posar-se al dia amb el camp de l’estator. El que es coneix com a "commutació en sis passos" defineix la seqüència d'energia dels bobinats.
En una commutació de sis passos, només dos dels tres bobinats del motor CC sense escombretes s’utilitzen alhora. Els passos equivalen a 60 graus elèctrics, de manera que sis passos fan una rotació completa de 360 graus. Un bucle de 360 graus complet pot controlar el corrent perquè només hi ha un camí actual. La commutació en sis passos sol ser útil en aplicacions que requereixen freqüències d’alta velocitat i commutació. Un motor de corrent continu sense escombretes de sis passos sol tenir una eficiència de parell menor que un motor commutat d’ona sinusoïdal.
Aplicacions típiques del motor BLDC
Podem classificar el tipus de control del motor BLDC en tres tipus principals:
Càrrega constant.
Càrregues variables.
Aplicacions de posicionament.
1- Aplicacions amb càrregues constants:
Aquests són els tipus d'aplicacions en què una velocitat variable és més important que mantenir la precisió de la velocitat a una velocitat fixada. A més, les taxes d’acceleració i desacceleració no canvien dinàmicament. En aquest tipus d’aplicacions, la càrrega s’acobla directament a l’eix del motor.
Per exemple, els ventiladors, les bombes i els bufadors són objecte d’aquest tipus d’aplicacions. Aquestes aplicacions requereixen controladors de baix cost, principalment operatius en bucle obert.
2- Aplicacions amb càrregues variables:
Aquests són els tipus d'aplicacions en què la càrrega del motor varia en un interval de velocitat. Aquestes aplicacions poden exigir precisió de control d’alta velocitat i bones respostes dinàmiques.
Per exemple,
Electrodomèstics: rentadores, assecadores i compressors.
En automoció, control de la bomba de combustible, control electrònic de la direcció, control del motor i control de vehicles elèctrics.
A l’aeroespacial, hi ha diverses aplicacions, com ara centrífugues, bombes, controls de braços robòtics, controls de giroscopi, etc.
Aquestes aplicacions poden utilitzar dispositius de retroalimentació de velocitat i poden funcionar en un bucle semitancat o en un bucle tancat total.
3- Aplicacions de posicionament:
La majoria dels tipus d'aplicacions industrials i d'automatització pertanyen a aquesta categoria. Les aplicacions d’aquesta categoria tenen algun tipus de transmissió de potència, que podria ser engranatges mecànics o corretges temporitzadores o un sistema senzill accionat per corretja. En aquestes aplicacions, la resposta dinàmica de velocitat i parell és important. A més, aquestes aplicacions poden tenir una inversió freqüent del sentit de gir.
Aquests sistemes operen principalment en bucle tancat.
Finalment, la comparació entre un motor de corrent continu raspallat (BDC) i un motor de corrent continu sense escombretes (BLDC) és la que es mostra a la imatge següent.

Segon: motors AC
Els motors de corrent altern (AC) utilitzen un corrent elèctric que inverteix la seva direcció a intervals regulars.
El principal avantatge dels motors de corrent continu sobre els motors de corrent altern és que la velocitat és més difícil de controlar per als motors de corrent altern. Per compensar això, els motors de corrent altern es poden equipar amb variadors de freqüència, però el control de velocitat millorat es combina amb una qualitat de potència reduïda.
Tipus de motors de corrent altern:

Els motors de corrent altern que s’utilitzen actualment es poden dividir en dues grans categories:
Motors d’inducció (asíncrons).
Motors síncrons.
Motors lineals.
Aquests dos tipus de motors difereixen en la forma en què es subministra l’excitació del camp del rotor:
Per als motors d’inducció, no hi ha una excitació del rotor aplicada externament, i el corrent s’indueix als bobinatges del rotor a causa del camp magnètic rotatiu de l’estator.
Per als motors síncrons, s’aplica una excitació de camp als bobinats del rotor. Aquesta diferència en l'excitació del camp comporta diferències en les característiques del motor, cosa que condueix al seu torn a requisits de protecció i control diferents per a cada tipus de motor.
1- Motor d’inducció
Els motors d’inducció són els motors més comuns que s’utilitzen per a diversos equips de la indústria.
Motor d’inducció: anomenat perquè la tensió s’indueix al rotor (per tant, no cal fer pinzells), però perquè això passi, el rotor que el rotor ha de tenir una velocitat inferior al camp magnètic per permetre l’existència d’una tensió induïda.
Per tant, cal un nou terme per descriure el motor d’inducció que és el lliscament.
La relliscada:
Un parell motriu només pot existir si hi ha un corrent induït a l'anell d'ombrejat. Està determinat pel corrent a l'anell i només pot existir si hi ha una variació de flux a l'anell. Per tant, hi ha d’haver una diferència de velocitat a l’anell d’ombreig i al camp giratori. Per això, un motor elèctric que funciona al principi descrit anteriorment s'anomena "motor asíncron".
La diferència entre la velocitat síncrona (Ns) i la velocitat de l’anell d’ombra (N) s’anomena “lliscament” (s) i s’expressa en percentatge de la velocitat síncrona.
S=(Nsyn - Nm) / Nsyn
On és la relliscada? El lliscament és una de les variables més importants en el control i el funcionament de les màquines d’inducció.
s=0: si el rotor funciona a velocitat síncrona.
s=1: si el rotor està estacionari.
s és –ve: si el rotor funciona a una velocitat superior a la velocitat síncrona.
s és + ve: si el rotor funciona a una velocitat inferior a la velocitat síncrona.
Avantatges:
Disseny senzill, resistent, econòmic i de fàcil manteniment.
Àmplia gamma de potències: potència fraccionada a 10 MW.
Funciona essencialment a una velocitat constant des de la càrrega a càrrega completa.
La seva velocitat depèn de la freqüència de la font d'energia.
Motor més popular actualment a la gamma de cavalls baixos i mitjans.
Construcció molt robusta.
S'han substituït els motors de corrent continu en zones on no es poden utilitzar motors de corrent continu com ara la mineria o els entorns explosius De dos tipus segons la construcció del motor; Gàbia d’esquirol o anell lliscant.
Desavantatges:
No és fàcil tenir un control de velocitat variable.
Requereix una unitat electrònica de potència de freqüència variable per a un control de velocitat òptim.
La majoria funcionen amb un factor de potència endarrerit.
Principi de funcionament:
L’estator sol estar connectat a la xarxa i, per tant, l’estator s’imanta.
El camp magnètic de l’estator talla els bobinatges del rotor i produeix una tensió induïda als bobinatges del rotor.
Com que els bobinatges del rotor estan curtcircuitats, tant per a la gàbia d'esquirol com per al rotor enrotllat, i els fluxos de corrent induïts als bobinatges del rotor.
El corrent del rotor produeix un altre camp magnètic.
El parell es produeix com a resultat de la interacció d’aquests dos camps magnètics.
Construcció:
Un motor d’inducció té dues parts principals
1- Estator
|
Estator de motor d’inducció |

Aquesta és la part immòbil del motor. Un cos de ferro colat o un aliatge lleuger alberga un anell de fines plaques d'acer de silici (d'uns 0,5 mm de gruix). Les plaques estan aïllades entre elles per oxidació o un vernís aïllant. La "laminació" del circuit magnètic redueix les pèrdues per histèresi i corrents de Foucault.
Les plaques tenen osques per als bobinats de l’estator que produiran el camp giratori per encabir-hi (tres bobinats per a un motor trifàsic). Cada bobina està formada per diverses bobines. La manera com s’uneixen les bobines determina el nombre de parells de pols del motor i, per tant, la velocitat de rotació.
2- Rotor
Aquesta és la part mòbil del motor. Igual que el circuit magnètic de l’estator, consisteix en plaques apilades aïllades entre si i formant un cilindre connectat a l’eix del motor.
Tipus de motors d’inducció
|
Tipus de motors d’inducció |

Els motors d’inducció es classifiquen segons el tipus de rotor de la següent manera:
A- Rotor de gàbia d'esquirol:

|
Rotor de gàbia d'esquirol |

Consisteix en barres conductores gruixudes incrustades en ranures paral·leles. Aquestes barres estan curtcircuitades pels dos extrems mitjançant anells de curtcircuit.
B- Rotor de ferides:

|
Rotor de ferides |

Té un bobinat distribuït trifàsic de doble capa. Està enrotllat per tants pals com l’estator. Les tres fases estan cablejades internament i els altres extrems estan connectats a anells lliscants muntats en un eix amb escombretes recolzades sobre elles.
Cadascun dels dos tipus de motors d’inducció anteriors es pot classificar en dos grups principals de la següent manera:
I- Motors d’inducció monofàsics:
Aquests només tenen un bobinatge d'estator, funcionen amb una font d'alimentació monofàsica, tenen un rotor de gàbia d'esquirol i requereixen un dispositiu per engegar el motor. Aquest és, amb diferència, el tipus de motor més comú que s’utilitza en electrodomèstics, com ara ventiladors, rentadores i assecadors de roba, i per a aplicacions de fins a 3 a 4 cavalls de potència.
Els motors d’inducció monofàsics també inclouen un rotor enrotllat que té excel·lents característiques d’arrencada i acceleració i són ideals per a operadors de valor, aplicacions de motors agrícoles, polipastos, màquines de manteniment de sòls, compressors d’aire, equips de bugaderia i equips per a mineria.
II- Motors d’inducció trifàsics:
El camp magnètic giratori es produeix mitjançant un subministrament trifàsic equilibrat. Aquests motors tenen altes capacitats de potència, poden tenir gàbies d'esquirols o rotors enrotllats (tot i que el 90% tenen un rotor de gàbies d'esquirols) i s'inicien automàticament. S'estima que al voltant del 70% dels motors de la indústria són d'aquest tipus, s'utilitzen en, per exemple, bombes, compressors, cintes transportadores, xarxes elèctriques de gran resistència i rectificadores. Estan disponibles entre 1/3 i centenars de potències.
Ara, vegem la primera classificació dels motors d’inducció basada en els tipus anteriors:
1- Monofàsica, gàbia d'esquirol, motor d'inducció:
Aquesta categoria té molts tipus com es mostra a la imatge següent.

A- Motors d’inducció de pal ombrejat
Principi de construcció i funcionament:
|
Motors d’inducció de pal ombrejat |

Els motors de pol ombrejat només tenen un bobinatge principal i no tenen bobinatge inicial. Començar és utilitzar un disseny que fa sonar un bucle de coure continu al voltant d’una petita porció de cadascun dels pols del motor. Això "ombreja" aquesta porció del pol, fent que el camp magnètic de la zona ombrejada es quedi enrere del camp de la zona sense ombra. La reacció dels dos camps fa que l’eix giri.
Avantatges:
Com que al motor de pol ombrejat li falta un bobinatge d’arrencada, un interruptor d’arrencada o un condensador, és senzill i econòmic elèctricament.
La velocitat es pot controlar només variant el voltatge o mitjançant un bobinatge de múltiples aixetes.
Mecànicament, la construcció del motor de pol ombrejat permet una producció de gran volum.
Normalment es consideren motors “d’un sol ús”, és a dir, són molt més barats de substituir que de reparar.
Desavantatges:
El seu parell d’arrencada baix sol ser del 25% al 75% del parell nominal.
És un motor de lliscament elevat amb una velocitat de funcionament del 7% al 10% inferior a la velocitat síncrona.
En general, l’eficiència d’aquest tipus de motors és molt baixa (per sota del 20%).
Aplicacions:
El baix cost inicial s’adapta als motors de pol ombrejat per a aplicacions de poca potència o lleugeres. Potser el seu ús més gran és en ventiladors de diverses velocitats per a ús domèstic. Però el parell baix, la baixa eficiència i les característiques mecàniques menys robustes fan que els motors de pol ombrejat siguin poc pràctics per a la majoria d’ús industrials o comercials, on les normes de cicle més elevades o de treball continu són més elevades.
En el proper tema, continuaré explicant altres tipus de motors d’inducció de gàbia d’esquirol monofàsics. Per tant, seguiu seguint.





